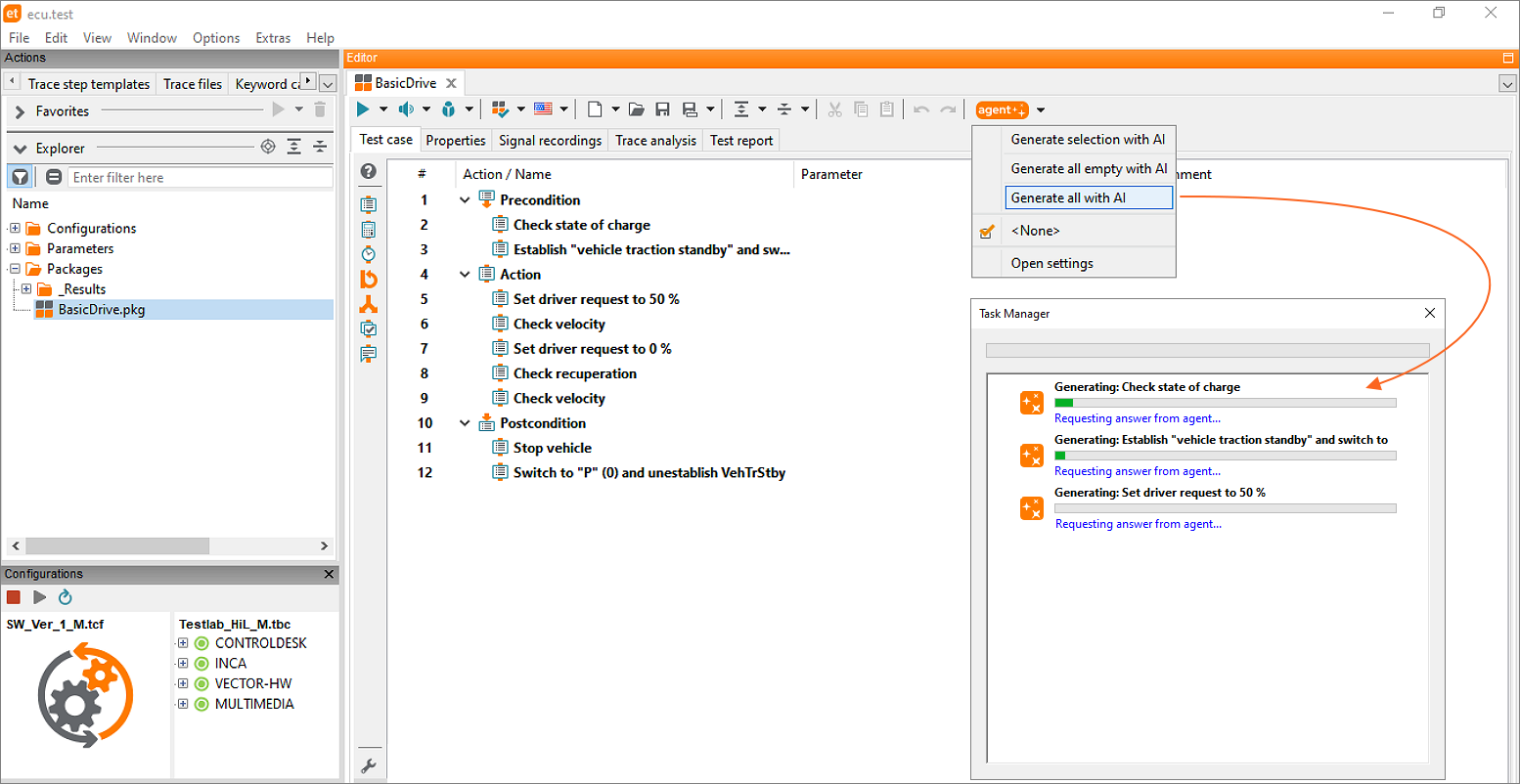
The ecu.test agent is an AI-powered assistant that significantly accelerates the creation of test cases in ecu.test. Fully integrated into ecu.test as a service, it automatically generates suitable, executable test steps from test case specifications with a single click. It accesses all relevant data directly from the workspace to accomplish this.
You can freely select the underlying AI model. We support both proprietary models, such as ChatGPT, Gemini, and Claude, and open-source models, such as Llama, Mistral, and Qwen. The ecu.test agent can also be operated entirely on-premise, ensuring that sensitive test data never leaves your company network. We are happy to help you set up a suitable configuration with a robust database. Please contact our support team.
Anyone with an active ecu.test license can now receive 50 free credits per month. Contact our sales team to receive your token and get started. You can also purchase larger credit packages.
ecu.test Release 2025.3
Highlights at a glance
AI-powered test case creation with ecu.test agent
ecu.test code
The test development workflows and test language in ecu.test are designed to meet the needs of test engineers. Reusability and an intuitive user interface for creating test cases were high priorities in the development of ecu.test.
As the role of software developers becomes more important and responsible in the development process, the need for lightweight test solutions that can be implemented in code is growing.
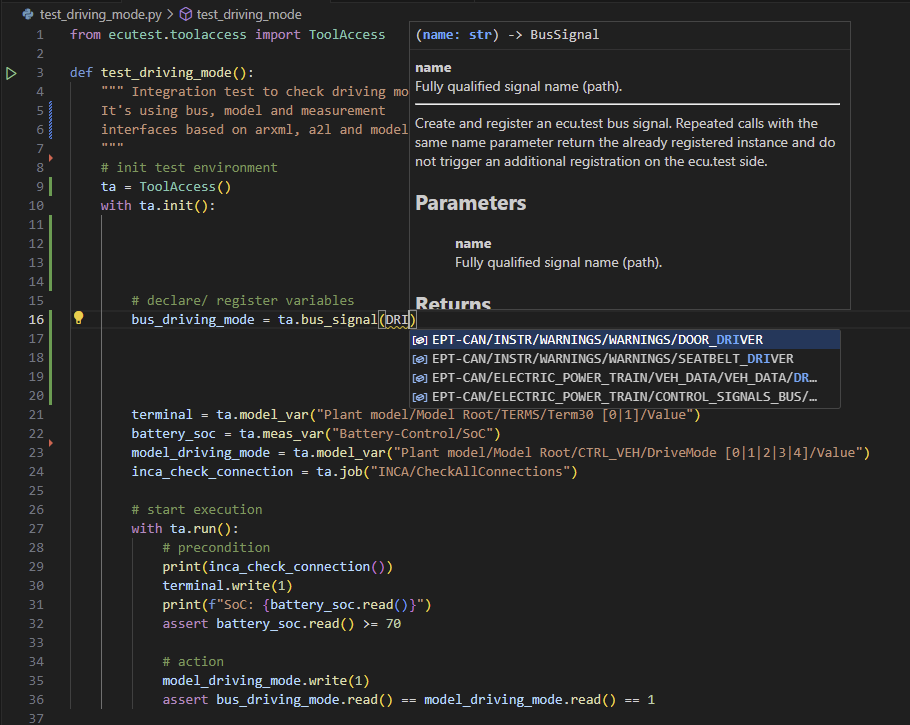
ecu.test code brings the capabilities of ecu.test to Python code to meet the needs of both worlds. Tailored to programmers' preferences, it can be used without learning the extensive concepts of ecu.test.
It is not a replacement for ecu.test, but rather an alternative way to benefit from its functionality. It promotes collaboration between engineers and developers while pursuing the shift-left goal.
As the role of software developers becomes more important and responsible in the development process, the need for lightweight test solutions that can be implemented in code is growing.
ecu.test code brings the capabilities of ecu.test to Python code to meet the needs of both worlds. Tailored to programmers' preferences, it can be used without learning the extensive concepts of ecu.test.
It is not a replacement for ecu.test, but rather an alternative way to benefit from its functionality. It promotes collaboration between engineers and developers while pursuing the shift-left goal.
Features
- Create and execute test cases from any Python environment
- Access all tools supported by ecu.test
- Quickly access test variables through autocompletion in Visual Studio Code
- Seamless test.guide integration for result playback
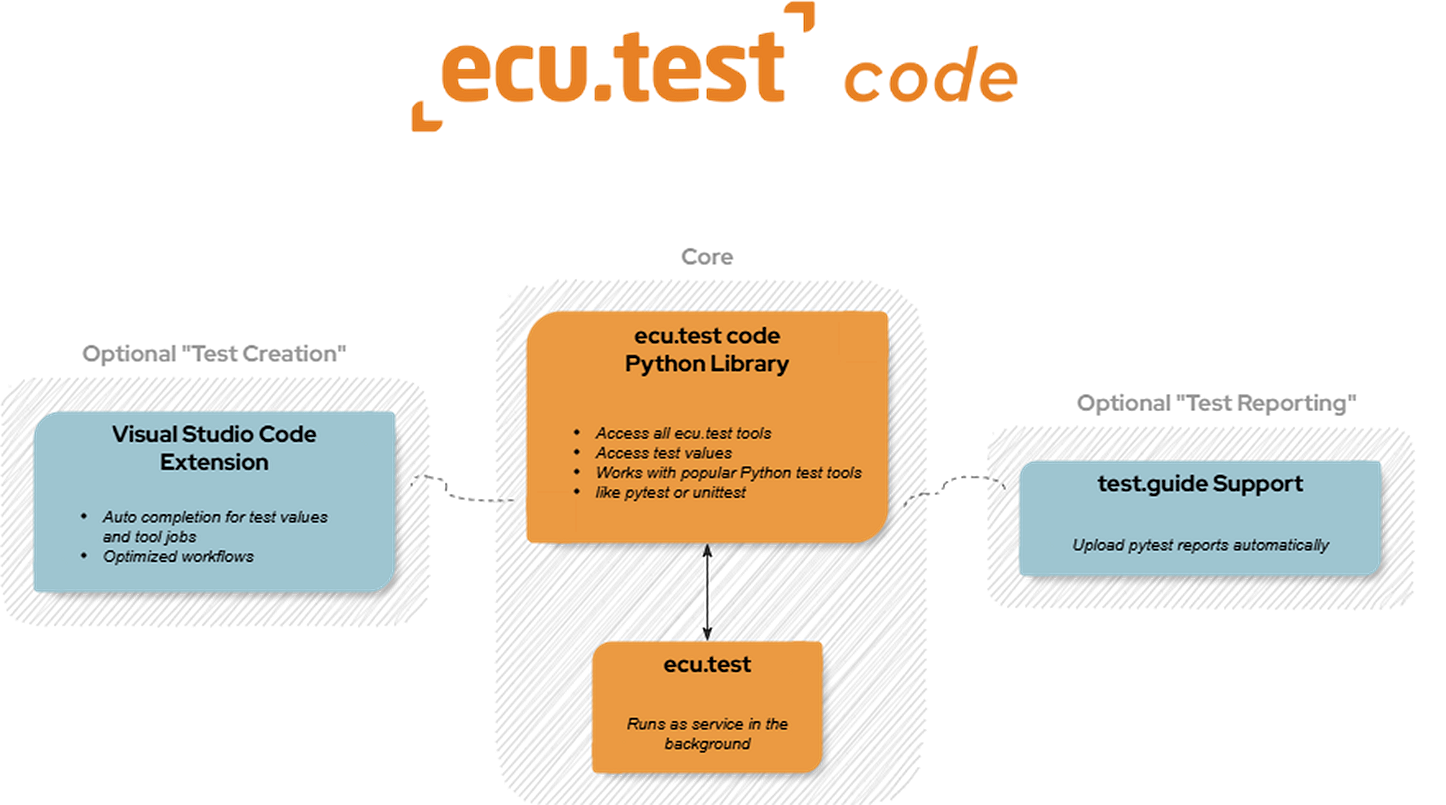
Structure
- The Python library is the main component of ecu.test code. It provides direct access to ecu.test functions in the Python environment, as well as access to tools, data, and automation primitives.
- The VS Code extension is an optional add-on. Building on the library, it offers extensive autocompletion, online help, and optimized authoring to design, parameterize, and execute test cases without leaving VS Code.
- Get quick access to test quantities through autocomplete in Visual Studio Code.
- The pytest plugin enables seamless integration of test reports into test.guide.
Getting started
We welcome your feedback and want to further develop ecu.test code based on your use cases. That's why we are initially making ecu.test code available on request. Just send us a short email to support@tracetronic.com. An additional license for ecu.test is not required at this time.To use Visual Studio Code, you can install the extension from the VS Code Marketplace.
To get started quickly, we have summarized further information in the ecu.test user manual under Getting Started.
Model time automatically affects all bus-related tools and diagnostics
With ecu.test, we support testing throughout the entire development cycle – from the first software baseline in SiL, through model testing in MiL, integration on HiL , up to vehicle testing.
However, the test domains are not always clearly separated. For instance, some low-cut models are already tested with virtual bus hardware. These hybrid test setups introduce new challenges, particularly regarding timing behavior. For example, the model's provided time must also affect individual communication layers to ensure synchronization of recordings with the model or to apply timeouts correctly.
This hurdle is now automatically handled by ecu.test, as model time is automatically forwarded to the bus and diagnostic components.
However, the test domains are not always clearly separated. For instance, some low-cut models are already tested with virtual bus hardware. These hybrid test setups introduce new challenges, particularly regarding timing behavior. For example, the model's provided time must also affect individual communication layers to ensure synchronization of recordings with the model or to apply timeouts correctly.
This hurdle is now automatically handled by ecu.test, as model time is automatically forwarded to the bus and diagnostic components.
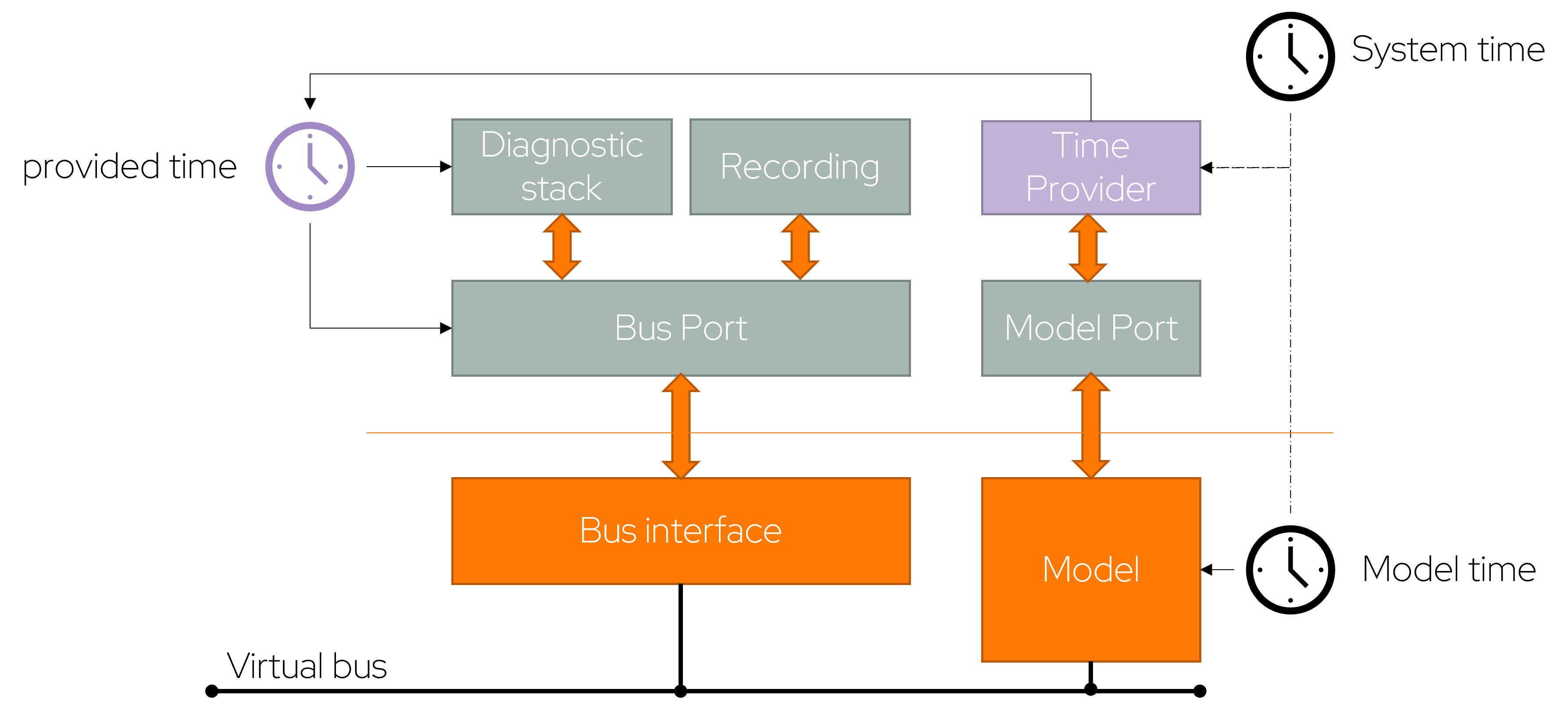
To activate this feature, simply select a model port in the TCF. This ensures the model time is automatically applied to the communication components. This applies to bus and diagnostic ports as well as tracetronic Ethernet ports.
Currently, only the continuous mode is supported. However, plans for stepwise execution are already in place. Feel free to contact us about this topic!
Currently, only the continuous mode is supported. However, plans for stepwise execution are already in place. Feel free to contact us about this topic!

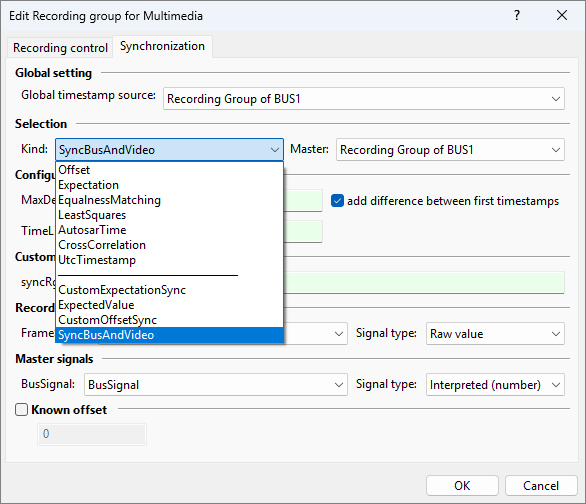
User-defined synchronization of recordings
In addition to access to simple signals, access to protocols and multimedia data is required to ensure the security of complex vehicle systems. Trace analysis often requires subsequent synchronization of different recordings from multiple sources. This synchronization must be able to process complex data for each use case individually.
The user-defined synchronization allows you to access signal values similar to trace step templates, apply your own algorithms or individual libraries, and determine a time offset. Synchronization is provided in the form of a self-implemented user Python library.
The user-defined synchronization allows you to access signal values similar to trace step templates, apply your own algorithms or individual libraries, and determine a time offset. Synchronization is provided in the form of a self-implemented user Python library.